
![]()
SICHERHEIT IM SCUTTLER … Parallele Entwicklung
Ich kann ja vieles, aber ich weis auch um meine Lücken und dazu gehört leider der Umgang mit dem Microcontroller Arduino, mit dem sich tolle Dinge realisieren lassen. Zumindest weis ich was machbar wäre, bzw. ist, aber im Detail brauch ich kompetente Hilfe, die ich diesmal in Facebook gefunden habe. Tobias ist da echt ein Vollprofie! 😉
Sicherheit im SCUTTLER
Das die Konstruktion der E-MOP (Mobile-Offroad-Platform) ca. 120-140kg schwer werden wird, ist das Thema Sicherheit ein primäres und auf jeden Fall muss das Umkippen des SCUTTLER verhinder werden. Meine Gedanken hierzu kurz zusammen gefasst.
BEDINGUNGEN/SENSOREN
1) Ein Sensor im Sitz wird erkennen, das ein Fahrer eingestiegen ist!
2) Die Fernsteuerung/Joystick ist in der Armlehne arretiert!
3) Ein Sensor überprüft die Pitch- und Roll-Achse!
FUNKTION
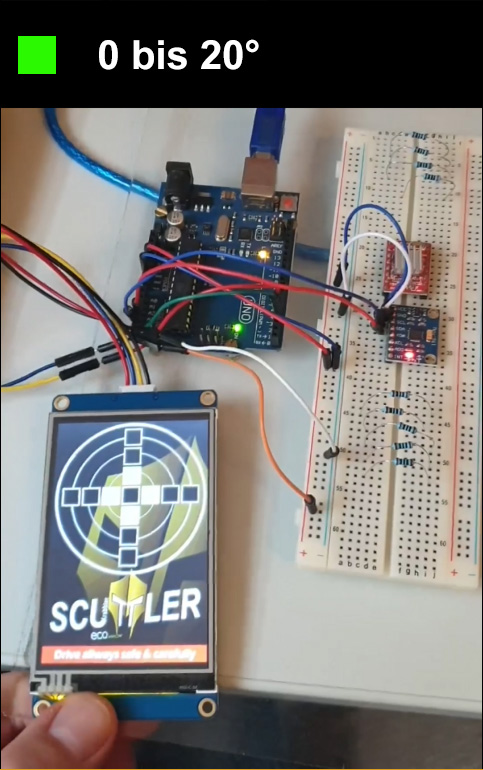
Der Lagesensor (elektronische Libelle) zeigt dem Fahrer optisch und akkustisch die Neigung des SCUTTLERS.
„GRÜN“ – alles OK
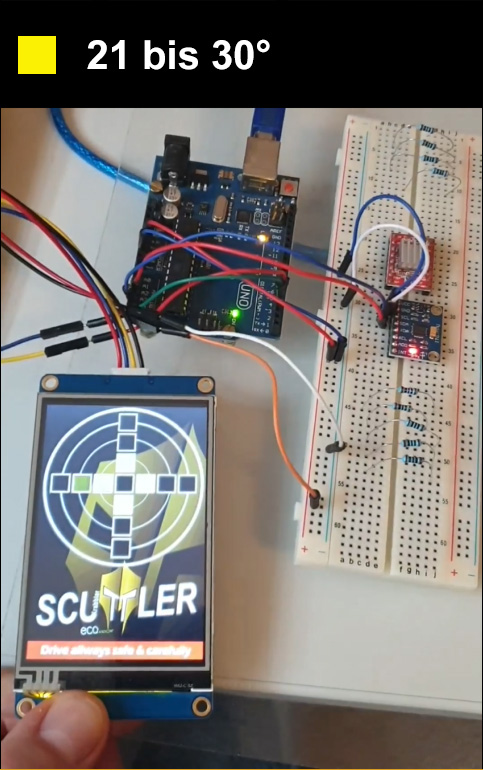
„GELB“ – Signalton, 1sec. Takt) – Aufpassen
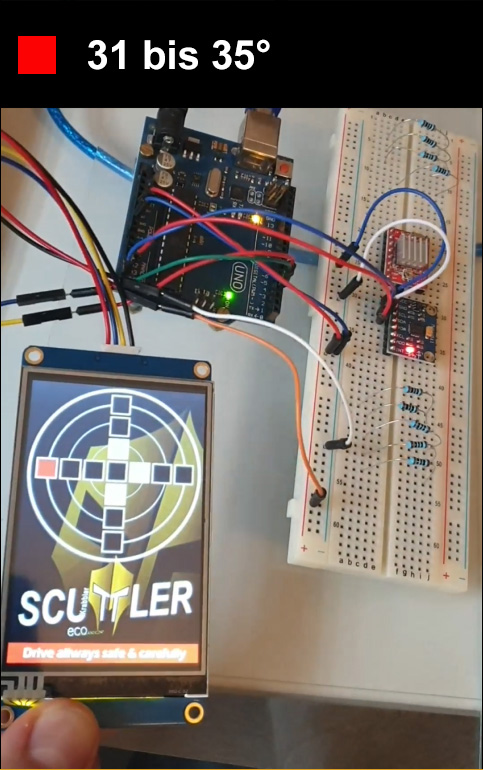
„ROT“ + Signalton, 0,5 sec Takt – Gefahr
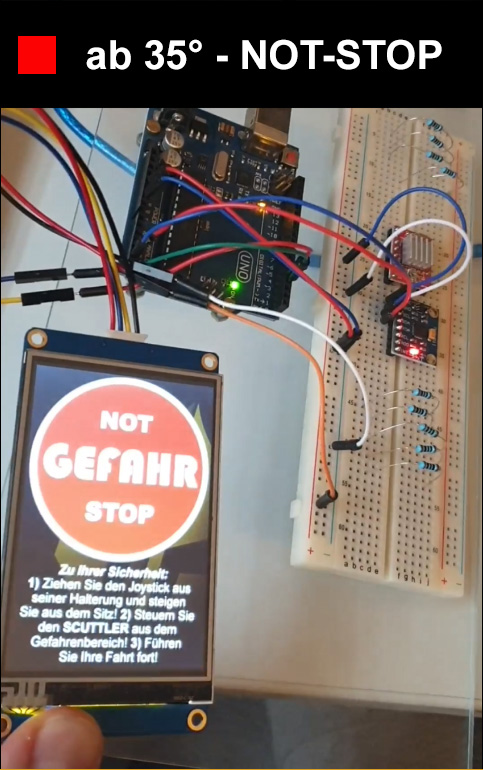
„NOT-STOP“ + Signalton – SCUTTLER bleibt stehen!
MASSNAHME
Ist der NOT-STOP eingeleitet MUSS der Fahrer aus dem Sitz aussteigen und die Fernsteuerung/Joystick aus seiner Halterung entnehmen und kann erst dann aus der Gefahrenzone gesteuert werden.
MÖGLICHKEITEN
Für andere Einsatzgebiete, z.B. Personen-Rettung, kann über einen gesonderten (verschlossenen) Überbrückungsschalter, der Sitzsensor überbrückt werden, das z.B. der Retter den SCUTTLER trotzdem fernsteuern kann. Diese speziellen (verschlossenen) Überbrückungsschalter dienen auch der Fehlersuche/Sensortests.